|
Meyenberg_Project
|


|
|
Meyenberg_Project
|
|
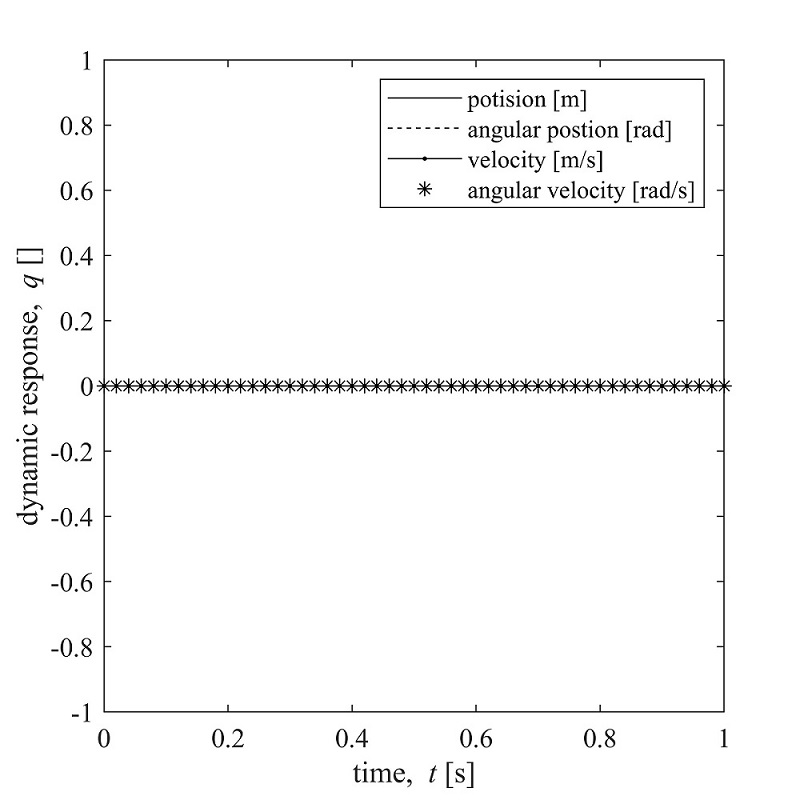
Plot 1.
Centered ball without motion on flat platform
Initial Conditions. The ball is initially at rest on a level platform directly above the center of gravity of the platform and there is no torque input from the motor. position = 0, angular position = 0, velocity = 0, angular velocity = 0, torque = 0.
Expected Results. This system should remain at rest since the ball is at equilibrium.
Analysis. The plot confirms the ball is at equilibrium and there is not movement in any direction.
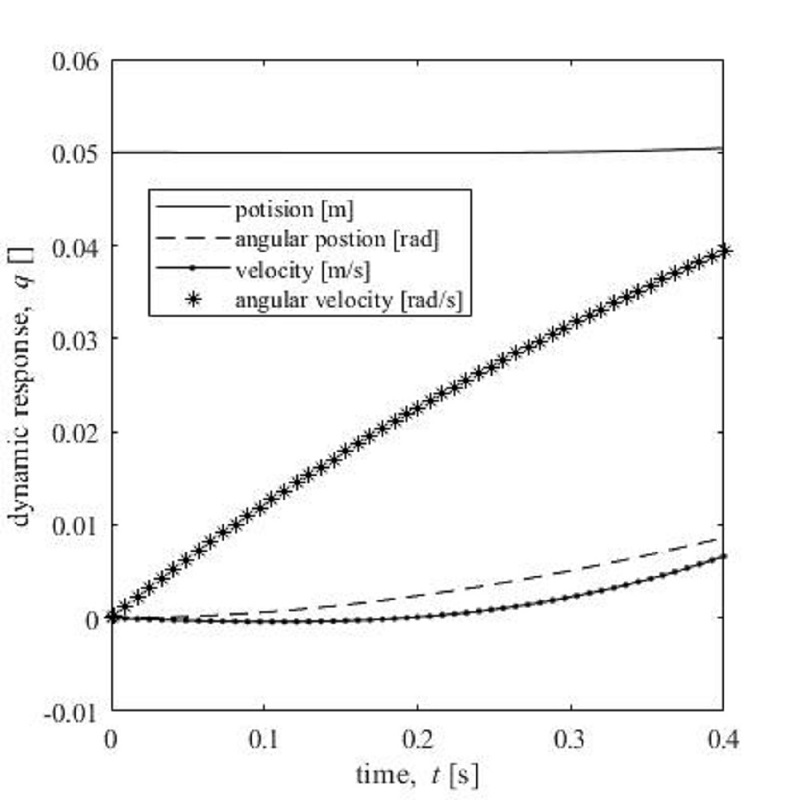
Plot 2. Offset ball without motion on flat platform
Initial Conditions. The ball is initially at rest on a level platform offset horizontally from the center of gravity of the platform by 5 [cm] and there is no torque input from the motor. position = 5 cm, angular position = 0, velocity = 0, angular velocity = 0, torque = 0.
Expected Results. This system should slowly tilt the platform since it is not balance, which will cause an acceleration but only moving the ball slightly in the short time scale.
Analysis. The plot confirms the platform will accelerate under the force of the ball, causing an acceleration and moving the ball just barely.
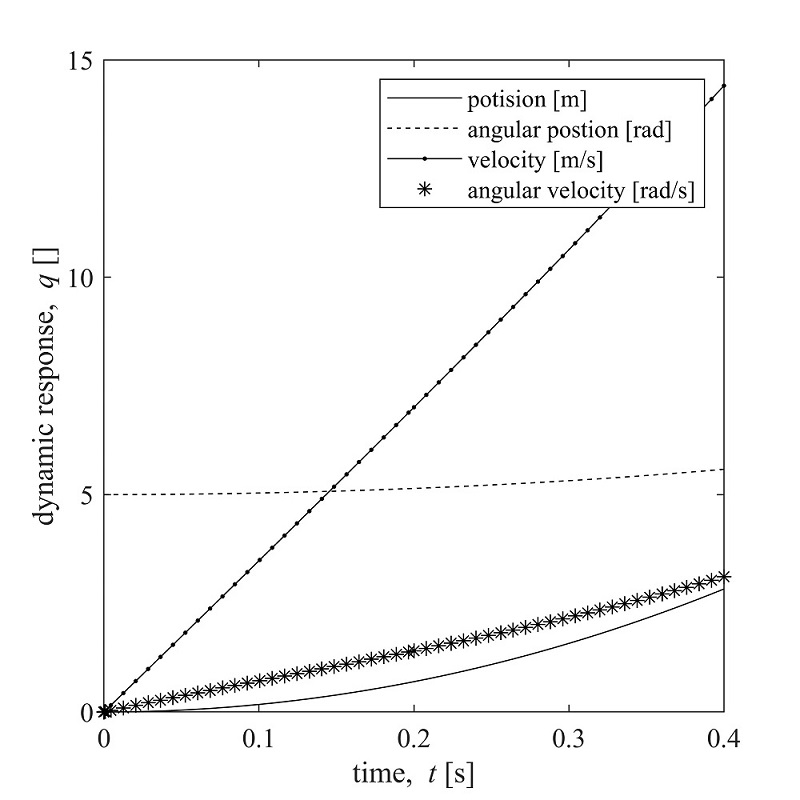
Plot 3. Centered ball without motion on angled platform
Initial Conditions. The ball is initially at rest on a platform inclined at 5 degrees directly above the center of gravity of the platform and there is no torque input from the motor. position = 0, angular position = 5 degrees, velocity = 0, angular velocity = 0, torque = 0.
Expected Results. This system should cause the ball to immediately begin accelerating from gravity, which will cause the position of the ball to move and the platform to become even more angled.
Analysis. The plot confirms the platform will accelerate the ball, causing it and the platform to change positions.
Plot 4. Centered ball without motion on flat platform with motor torque
Initial Conditions. The ball is initially at rest on a level platform directly above the center of gravity of the platform and there is an impulse1 of 1 mNm*s applied by the motor. position = 0, angular position = 0, velocity = 0, angular velocity = 0, torque = 1 mNm*s.
Expected Results. This system should cause the platform to immediately begin accelerating from the torque, which will cause the angular position of the platform to move and the ball to begin moving.
Analysis. The plot confirms the platform will accelerate the ball, causing it and the platform to change positions.
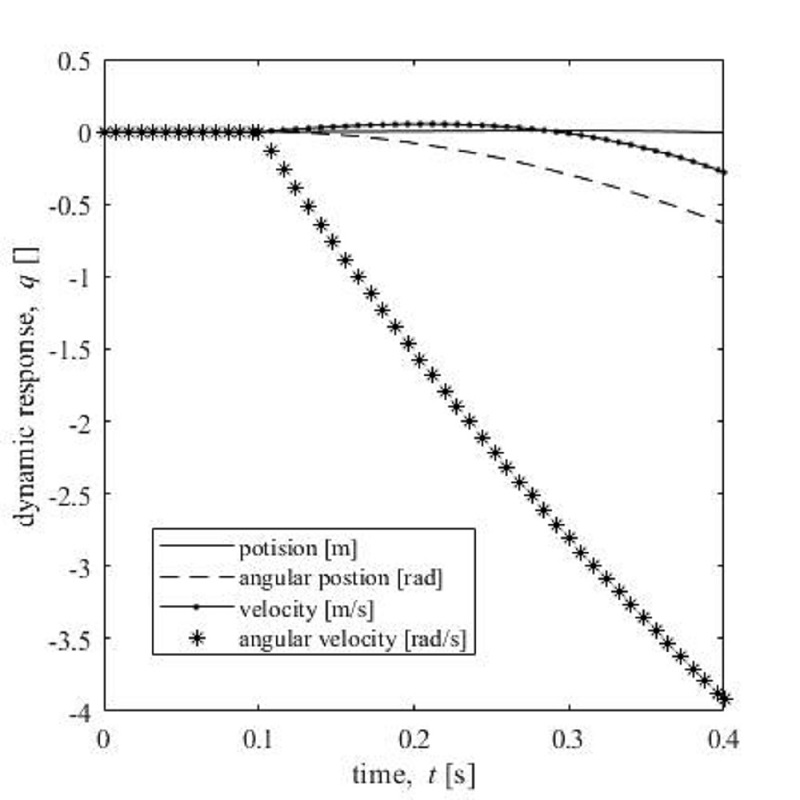
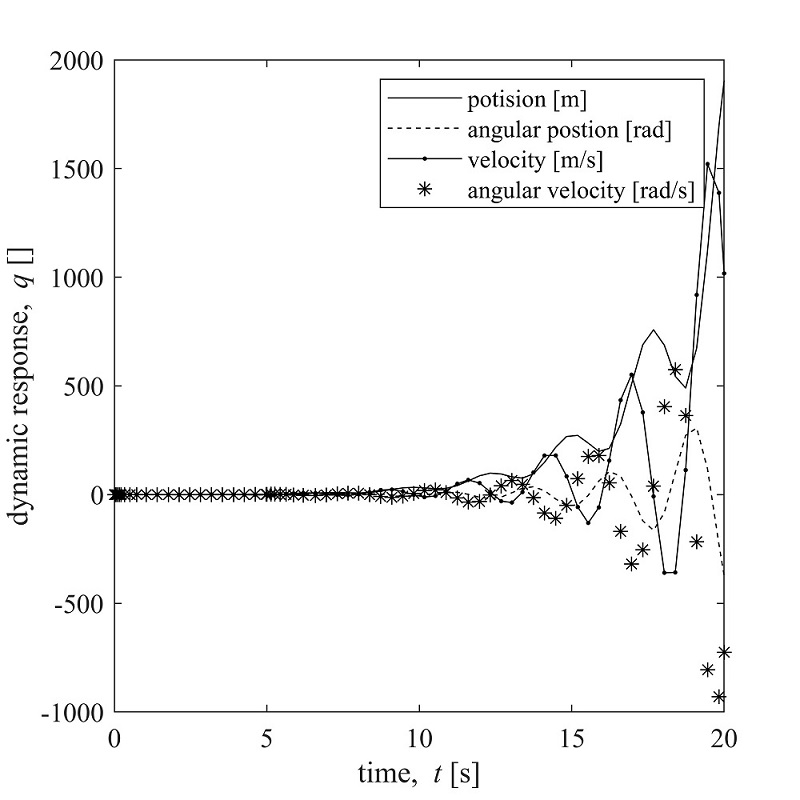
Plot 5. Offset ball without motion on flat platform and using full state feedback
Initial Conditions. The ball is initially at rest on a level platform offset horizontally from the center of gravity of the platform by 5 [cm] and there full state feedback from the motor. position = 5 cm, angular position = 0, velocity = 0, angular velocity = 0, torque = [-0.05 Ns, -0.02 Nms, -0.3 N, -0.2 Nm].
Expected Results. This system should cause the ball to remain on the platform and become stable, as the motor should be applying the appropriate torque to balance the ball and platform.
Analysis. The plot shows how the system was stable for a period of time but ultimately lost equilibrium. This indicates our calculations were slightly off.